INSTRUCTIONS FOR MASTER AND SEMESTER PROJECTS
Please find below the links towards the instructions for the master or semester projects.
Note : the registration to the Instant-Lab secretary has to be done 3 weeks prior to the semester beginning
and the model sheet for the project resume
All the student projects of the section SGM are available in this link
Instant-Lab available projects:
Flexure-based pick-and-place robot (Already taken)
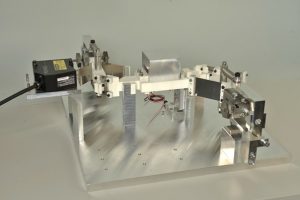 The goal of this project, in collaboration with Mikron, is to actuate and control a new type of 2-DoF flexure-based pick-and-place robot close to its eigenfrequency. The flexure-based implementation, in addition to the voice coil actuation, allows for energy-efficient trajectory planning strategies.
The goal of this project, in collaboration with Mikron, is to actuate and control a new type of 2-DoF flexure-based pick-and-place robot close to its eigenfrequency. The flexure-based implementation, in addition to the voice coil actuation, allows for energy-efficient trajectory planning strategies.
The project consists of:
- Familiarizing yourself with the TI LAUNCHXL-F28379D Development kit.
- Control the 2-DoF pick-and-place robot close to its eigenfrequency.
- Realizing a pick-and-place operation with an electromagnet attached to the end-effector.
Required background:
- Control
- Mechanical design
Location: EPFL Associated campus of Neuchâtel
Sections: SGM or other interested
Contact email: [email protected]
Biomimetic Mechanical Sound Generation 
The goal of this project is to design a new type of biomimetic sound producing mechanism inspired by the stridulation of crickets. The well known sound chirping of crickets is very pure in tone, loud, consumes very little energy and is low volume. Several applications like mechanical watch alarms or musical instruments can be imagined.
Project consists of:
Two subjects depending on student background:
- Mechanical design and manufacturing of a prototype (Sections: MT, ME)
- Physical modelling of the stridulation principle in crickets (Sections: MT, ME, MA, PH)
Location: EPFL Associated campus of Neuchâtel
Contact email: [email protected]
Flexure based surgical tool
Growing life expectancy goes together with improvement of healthcare. New threatment methods are becoming less invasive, allowing for shorter recovery time. Following this trend we would like to propose a new micro-surgical tool.
Project will focus on development of flexible structure for flexture based surgical tool. It will allow for 2DoF of rotations. End effector integrated in such flexure will be a gripper, or other depending on medical application.
Whole structure should be open for either manual or robotic actuation.
Required background :
- Mechanical design
Location : EPFL Associated campus of Neuchâtel
Sections : SGM or other interested
Contact email : [email protected]
Smart Gripper with SMA based actuation
This project focuses on the design and implementation of a new type of actuation using shape memory alloys, and their integration with a bistable flexure gripper structure. SMA have advantages like high force to volume ratio, but are slow, which poses a main challenge that needs to be solved using smart design.
Project consists of :
- Designing a mechanical implementation
- Manufacturing with laser cutting, 3D printing, conventional machining
- Measurements on an up-scaled model, and on a 1:1 scale gripper if time allows
Required background :
- Mechanical design
Location: EPFL Associated campus of Neuchâtel
Sections: SGM or other interested
Contact email : [email protected]
Flexure fly wheel (Already taken)
Master project consists of :
A flexure mechanism allowing circular motion has been developed theoretically, but has not yet been experimentally validated. The project goal is to validate the concept with a proof-of-concept prototype.
To be done during the project:
- design and dimensioning of the test bench
- fabrication and testing of the demonstrator (through 3D printing, laser cutting,..)
- if enough time is available, replacement of the wheel of a model steam engine by the demonstrator in order to show their equivalence.
Required background :
- Mechanical design
- Concept of flexure mechanics
Location: EPFL Associated campus of Neuchâtel
Sections: SGM or other interested
Contact email : [email protected]
Bistable gripper (Already taken)
 Grippers are commonly used in robotics to grab and deliver parts at a precise location. In the medical domain, grippers are used as surgical tools for example. However, it is difficult to scale them down to a few millimeters due to tolerances of manufacturing and assembly. Fabricating a gripper based on flexure and bistable mechanics could be a solution and brings multiple other advantages and applications.
Grippers are commonly used in robotics to grab and deliver parts at a precise location. In the medical domain, grippers are used as surgical tools for example. However, it is difficult to scale them down to a few millimeters due to tolerances of manufacturing and assembly. Fabricating a gripper based on flexure and bistable mechanics could be a solution and brings multiple other advantages and applications.
Project consists of :
- Kinematics design of the gripper
- Prototype design, fabrication and testing
Required background :
- Mechanical design
- Concept of flexure mechanics
Location: EPFL Associated campus of Neuchâtel
Sections: SGM or other interested
Contact email : [email protected]